



Type d'arbre de réduction d'entraînement Harmonic, modèle SHF-S-14 / SHF-S-17 / SHF-S -20 / SHF-S -25 / SHF-S-32. Le type SHF-S est le type d’arbre de la série à engrenages harmoniques GIGAGER. Le principe de la réduction d’engrenages harmoniques GIGAGER consiste à utiliser le mouvement relatif du Flexspline, de la Spline circulaire et du générateur d’ondes, principalement la déformation élastique contrôlable du flexspline pour réaliser le mouvement et la transmission de puissance.
1. Quelles sont les caractéristiques du GIGAGER Harmonic Drive?
• Performances élevées
• Haute efficacité
• faible jeu
• haute rigidité
2. Entraînement harmonique de la série SHF Shaft
Séries | Type | Spec | Rapport de vitesse | |||||
SHF | S (arbre) | 14 | 30 | 50 | 80 | 100 | - | - |
| 17 | 30 | 50 | 80 | 100 | - | - | ||
| 20 | 30 | 50 | 80 | 100 | 120 | - | ||
| 25 | 30 | 50 | 80 | 100 | 120 | 160 | ||
| 32 | 50 | 80 | 100 | 120 | - | - | ||
Pour plus de séries CSF, SHD, CSD, veuillez consulter le catalogue ci-joint. (téléchargez le PDF sur cette page)
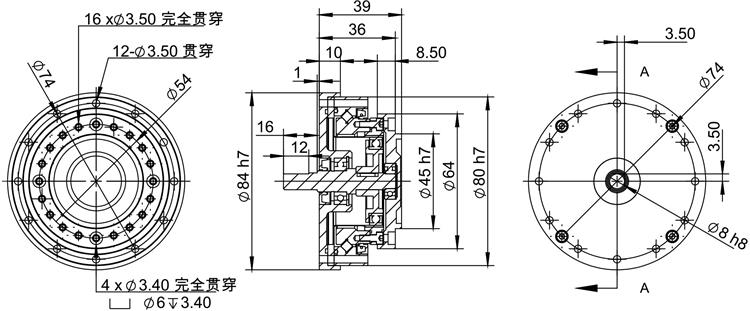
Modèle: SHF-S-14

Articles | Rapport de vitesse | ||||
| 30K | 50K | 80K | 100K | ||
Couple nominal (entrée 2000r / min) | Nm | 3.8 | 5.1 | 7.4 | 7.4 |
Couple maximal autorisé (Démarrage • Arrêt) | Nm | 8.6 | 17 | 22 | 27 |
Valeur maximale admissible du couple de charge moyen | Nm | 7,8 | 6.6 | 10.5 | 10.5 |
Couple maximal admissible instantané | Nm | 16 | 33 | 45 | 51 |
Vitesse de rotation maximale admissible de l'entrée | r / min | 8000 | 8000 | 8000 | 8000 |
Vitesse de rotation d'entrée moyenne autorisée | r / min | 3500 | 3500 | 3500 | 3500 |
Contrecoup | Arc sec | 20 | 20 | 10 | 10 |
Durée de vie conçue | heure | 10000 | 10000 | 15000 | 15000 |
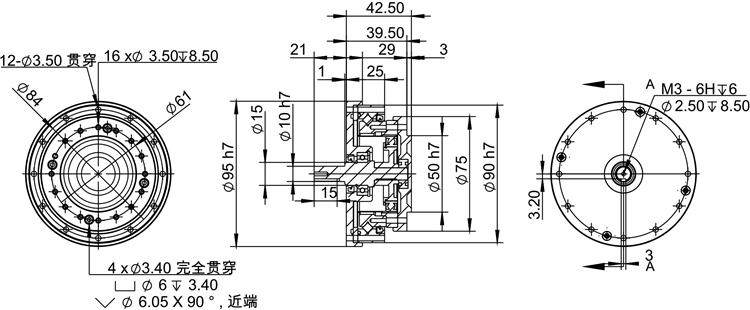
Modèle: SHF-S-17
Articles | Rapport de vitesse | ||||
| 30K | 50K | 80K | 100K | ||
Couple nominal (entrée 2000r / min) | Nm | 8.4 | 15.2 | 21 | 23 |
Couple maximal autorisé (Démarrage • Arrêt) | Nm | 15.2 | 32 | 41 | 52 |
Valeur maximale admissible du couple de charge moyen | Nm | 11.5 | 25 | 26 | 38 |
Couple maximal admissible instantané | Nm | 29 | 66 | 83 | 108 |
Vitesse de rotation maximale admissible de l'entrée | r / min | 7000 | 7000 | 7000 | 7000 |
Vitesse de rotation d'entrée moyenne autorisée | r / min | 3500 | 3500 | 3500 | 3500 |
Contrecoup | Arc sec | 20 | 20 | 10 | 10 |
Durée de vie conçue | heure | 10000 | 10000 | 15000 | 10000 |
Modèle: SHF-S-20
Articles | Rapport de vitesse | |||||
| 30K | 50K | 80K | 100K | 120K | ||
Couple nominal (entrée 2000r / min) | Nm | 14 | 24 | 32 | 38 | 38 |
Couple maximal autorisé (Démarrage • Arrêt) | Nm | 26 | 53 | 70 | 78 | 83 |
Valeur maximale admissible du couple de charge moyen | Nm | 19 | 32 | 45 | 47 | 47 |
Couple maximal admissible instantané | Nm | 48 | 93 | 121 | 140 | 140 |
Vitesse de rotation maximale admissible de l'entrée | r / min | 6000 | 6000 | 6000 | 6000 | 6000 |
Vitesse de rotation d'entrée moyenne autorisée | r / min | 3500 | 3500 | 3500 | 3500 | 3500 |
Contrecoup | Arc sec | 20 | 20 | 10 | 10 | 10 |
Durée de vie conçue | heure | 10000 | 10000 | 15000 | 15000 | 15000 |
Modèle: SHF-S-25

Articles | Rapport de vitesse | ||||||
| 30K | 50K | 80K | 100K | 120K | 160K | ||
Couple nominal (entrée 2000r / min) | Nm | 26 | 37 | 60 | 64 | 64 | 64 |
Couple maximal autorisé (Démarrage • Arrêt) | Nm | 48 | 93 | 130 | 149 | 159 | 167 |
Valeur maximale admissible du couple de charge moyen | Nm | 36 | 52 | 83 | 103 | 103 | 103 |
Couple maximal admissible instantané | Nm | 90 | 177 | 242 | 270 | 289 | 298 |
Vitesse de rotation maximale admissible de l'entrée | r / min | 5500 | 5500 | 5500 | 5500 | 5500 | 5500 |
Vitesse de rotation d'entrée moyenne autorisée | r / min | 3500 | 3500 | 3500 | 3500 | 3500 | 3500 |
Contrecoup | Arc sec | 20 | 20 | 10 | 10 | 10 | 10 |
Durée de vie conçue | heure | 10000 | 10000 | 15000 | 15000 | 15000 | 15000 |
Modèle: SHF-S-32

Articles | Rapport de vitesse | ||||
| 50K | 80K | 100K | 120K | ||
Couple nominal (entrée 2000r / min) | Nm | 72 | 112 | 130 | 130 |
Couple maximal autorisé (Démarrage • Arrêt) | Nm | 205 | 289 | 325 | 335 |
Valeur maximale admissible du couple de charge moyen | Nm | 103 | 159 | 208 | 205 |
Couple maximal admissible instantané | Nm | 363 | 540 | 635 | 652 |
Vitesse de rotation maximale admissible de l'entrée | r / min | 4500 | 4500 | 4500 | 4500 |
Vitesse de rotation d'entrée moyenne autorisée | r / min | 3500 | 3500 | 3500 | 3500 |
Contrecoup | Arc sec | 20 | 10 | 10 | 10 |
Durée de vie conçue | heure | 10000 | 15000 | 15000 | 15000 |
3. Pourquoi choisir GIGAGER?




4. Connaissances connexes
Mécanicien de Harmonic Drive
La théorie de l'engrenage à ondes de déformation est basée sur la dynamique élastique et utilise la flexibilité du métal. Le mécanisme comporte trois composants de base: un générateur d’ondes (2 / vert), une spline de flexion (3 / rouge) et une spline circulaire (4 / bleue). Les versions plus complexes ont un quatrième composant normalement utilisé pour raccourcir la longueur totale ou pour augmenter la réduction d'engrenage dans un diamètre inférieur, tout en suivant les mêmes principes de base.
Le générateur de vagues est composé de deux parties distinctes: un disque elliptique appelé bouchon de générateur de vagues et un roulement à billes extérieur. Le bouchon d'engrenage est inséré dans le roulement, lui donnant ainsi une forme elliptique.
La spline de flexion a la forme d’une cupule peu profonde. Les côtés de la spline sont très minces, mais le fond est relativement rigide. Cela se traduit par une flexibilité importante des parois à l'extrémité ouverte du fait de la paroi mince et du côté fermé assez rigide et capable d'être solidement fixé (à un arbre, par exemple). Les dents sont positionnées radialement autour de l'extérieur de la cannelure de flexion. La cannelure de flexion est étroitement ajustée sur le générateur de vagues, de sorte que lorsque la fiche du générateur de vagues est tournée, elle se déforme en une ellipse tournante et ne glisse pas sur la bague elliptique extérieure du roulement à billes. Le roulement à billes permet à la cannelure de flexion de tourner indépendamment de l'arbre du générateur de vagues.
La spline circulaire est un anneau circulaire rigide avec des dents à l'intérieur. La spline de flexion et le générateur d'ondes sont placés à l'intérieur de la spline circulaire, engrenant les dents de la spline de flexion et de la spline circulaire. Étant donné que la spline de flexion est déformée en une forme elliptique, ses dents ne s'engrènent réellement qu'avec les dents de la spline circulaire dans deux régions des côtés opposés de la spline de flexion (situées sur le grand axe de l'ellipse).
Supposons que le générateur d'ondes est la rotation d'entrée. Lorsque la fiche du générateur d'ondes tourne, les dents de la cannelure de flexion qui sont en prise avec celles de la cannelure circulaire changent lentement de position. L'axe principal de l'ellipse de la cannelure de flexion tourne avec le générateur de vagues, de sorte que les points de maillage des dents tournent autour du centre au même taux que l'arbre du générateur de vagues. La clé de la conception de l'engrenage à ondes de déformation réside dans le fait qu'il y a moins de dents (souvent par exemple deux de moins) sur la spline de flexion que sur la spline circulaire. Cela signifie que pour chaque rotation complète du générateur d'ondes, la spline de flexion doit pivoter légèrement (deux dents dans cet exemple) vers l'arrière par rapport à la spline circulaire. Ainsi, l'action de rotation du générateur d'ondes entraîne une rotation beaucoup plus lente de la cannelure de flexion dans le sens opposé.
Pour un mécanisme d'engrenage à ondes de déformation, le rapport de réduction d'engrenage peut être calculé à partir du nombre de dents de chaque engrenage:

Par exemple, s'il y a 202 dents sur la spline circulaire et 200 sur la spline flexible, le rapport de réduction est (200 - 202) / 200 = −0,01.
Ainsi, la spline de flexion tourne à 1/100 de la vitesse de la prise du générateur de vagues et dans le sens opposé. Différents ratios de réduction sont définis en modifiant le nombre de dents. Cela peut être réalisé en modifiant le diamètre du mécanisme ou en modifiant la taille des dents individuelles et en préservant ainsi leur taille et leur poids. La gamme de rapports de réduction possibles est limitée par les limites de taille de dent pour une configuration donnée.
étiquette à chaud: joints robotiques harmonic drive, Chine, fabricants, fournisseurs, usine, haute qualité




